Distributed Topology Analysis and Control of Communication Network within Multi-Robot Systems
 Distributed Link Addition to Ensure Strong Connectivity
Distributed Link Addition to Ensure Strong ConnectivityOne key enabler of Multi-Robot Systems (MRS) is each robots’ ability to share information with other robots within its communication range. This materializes as a communication network that enables cooperation within MRS to pursue a desired collective behavior via a given cooperative control framework. This research topic focus on how to optimize the network topology of MRS’s communication network, emphasizing on resilience and privacy preservation.
Research results:
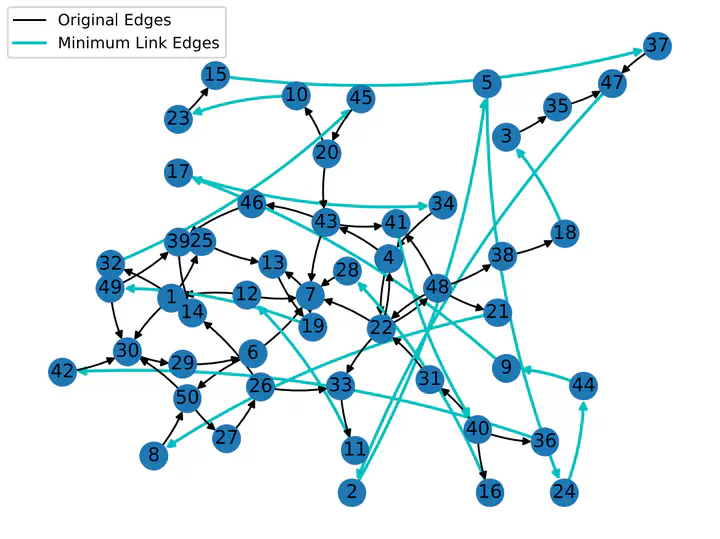
[CDC2021] [TNSE2022] Novel distributed approach that allows each node to distributively:
- estimate strongly connected components (SCCs),
- verify the absence of strongly connected property, and
- propose new links to ensure strongly connected.
This allows verification and ensurance of strongly connected network without prior strong connectivity assumption or knowledge of the overall network topology (privacy-preservation).
[ECC2024] An extension of the above approach for spatially distributed network
Made Widhi Surya Atman
Assistant Professor
My research interests include distributed control of networked systems, human–swarm interaction, and dissipative-based control.