Safe-Critical Distributed Optimization of MRS with Multi-Objective
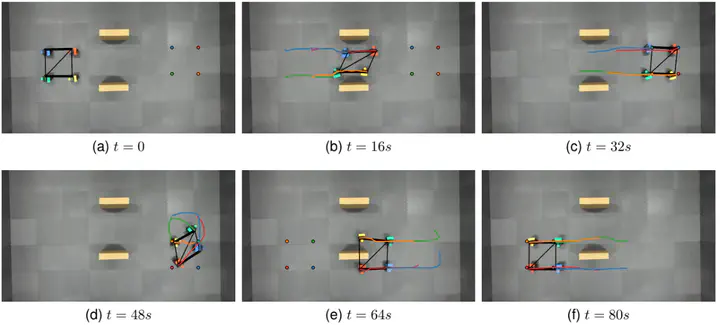 Formation maintenance (with rigid and flexible edges) and collision avoidance
Formation maintenance (with rigid and flexible edges) and collision avoidanceTraditionally, augmenting additional objectives and constraint commonly requires a redesign of the existing cooperative control framework. Recently, an emerging approach via control barrier function (CBF) allows a more streamlined way to incorporate multiple objectives and safety requirements as constraints within an optimization problem. This research topic focus on how to guarantee safety deployment of MRS under multiple objectives within an unstructured environment.
Research results:
[CCTA2022] [RAL2024b] Proposed distributed approach via barrier function approach that encapsulate the requirements for formation maintenance and collision avoidance.
[RAL2024a] Proposed an online synthesis of barrier function for collision avoidance with LiDAR data via Gaussian Process Regression.
[RAS2025] Proposed additional circulation constraint for control barrier function to alleviate deadlock.
Made Widhi Surya Atman
Assistant Professor
My research interests include distributed control of networked systems, human–swarm interaction, and dissipative-based control.